Original article: http://robotics.cs.iastate.edu/ResearchBatting2D.shtml
Artikulli origjinal: http://robotics.cs.iastate.edu/ResearchBatting2D.shtml
Të godasësh një top ne fluturim apo ndonje objekt tjetër katror është një manover që do aq shumë aftësi saqë per një njeri duhet gjithe ajo praktikë për ta mesuar. Për një robot, kjo punë është një sfide qe do kontroll dhe super koordinim deri ne nje fraksion sekondi. Detyra eshte qe te hedhesh nje top drejt nje krahu robotik me 2 lidhje ne te cilen eshte vendosur nje shkop per gjuajtjen e topit dhe duhet planifikuar levizja e krahut qe te godase topin ne nje trajektore drejt shenjestres.
Dinamika e ndikimit modelin ndryshimin në lëvizje të bat dhe objektit, i cili prodhon një gjendje pas impakt të objektit që mund të vlerësohet duke iu nënshtruar kufizimit të fluturimit drejt objektivit. Në këtë punë, konsiderohet ndikim dy-dimensional, në të cilin trajektoret e krahut robot dhe objekti janë të kufizuara në një plan vertikal. Më pas zhvillohet një zgjidhje për problemin e ndikimit të kundërt, në të cilin një trajektore e dëshiruar pas impaktit të objektit përmes objektivit çon në një ndryshim të dëshiruar në lëvizjen e tij gjatë ndikimit dhe përfundimisht në lëvizjen e mbushjes së nevojshme për të prodhuar ndryshimin. Videoja më poshtë tregon rezultatet nga raste të ndryshme të goditjes.
Sistemi i goditjes
Për të ekzekutuar me sukses detyrën e goditjes, duhet të realizohen disa komponentë shtesë të mbushjes, të tilla si kinematika e manipulimit, mekanika e fluturimit dhe vlerësimi i lëvizjes së objektit. Figura më poshtë ilustron se si këto komponente punojnë së bashku në sistemin tonë të mbushjes:
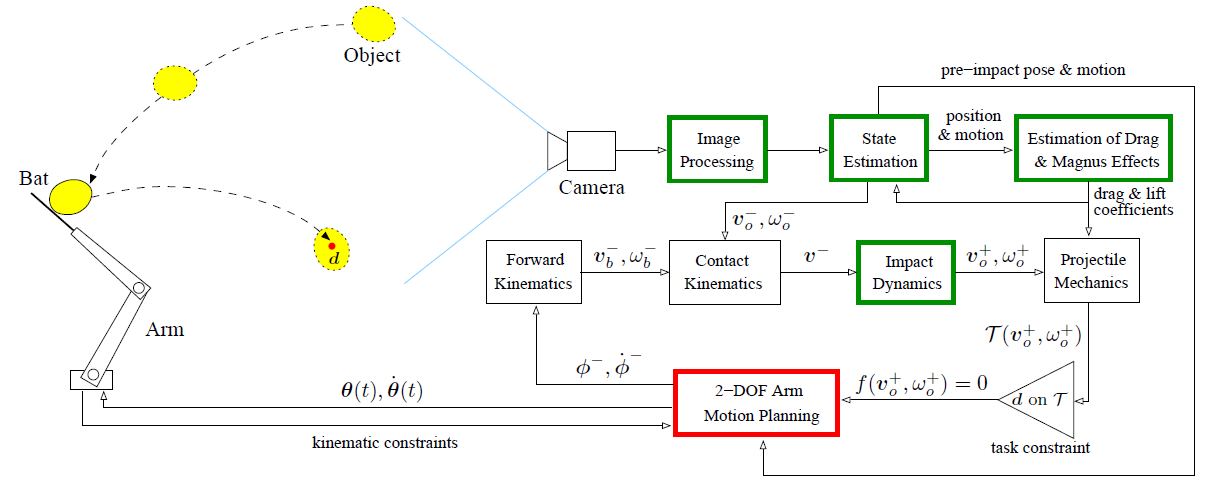
Mekanika projektile e çdo objekti konsiderohet, ku efektet aerodinamike të drag dhe Magnus përafrohen nga vlerësimi i shtetit dhe përdoren në parashikimin e trajektores së objektit para dhe pas ndikimit. Përveç kësaj, Kinematika e krahut robot në lidhje me Dinamikën e Ndikimit kontribuon me kufizimet në algoritmin e Planifikimit të Lëvizjes, i cili vazhdimisht nxjerr një trajektore të përbashkët të dëshiruar në krahun e robotit.
Vlerësimi i lëvizjes
Vizioni kompjuterik është një komponent thelbësor i punës së goditjes që është e nevojshme për robotin të perceptojë pozicionin dhe orientimin e objektit duke përpunuar imazhe nga një aparat fotografik, ndërsa vlerësimi i lëvizjes është i nevojshëm për të gjurmuar shpejtësinë e objektit. Një vlerësues i lëvizjes hibride zbatohet duke përdorur sheshet më të vogla të orientimit të objektit dhe një filtër të zgjeruar Kalman që merr parasysh forcat aerodinamike të dragit dhe Magnus. Përfshirja e aerodinamikës lejon parashikimin e saktë të trajektores së pozicionit të objektit para dhe pas ndikimit, gjë që është thelbësore për robotin që të ekzekutojë detyrën me një normë të suksesshme suksesi. Ndërkohë, sheshet më të vogla që përshtaten me orientimin e objektit japin një vlerësim të shpejtësisë këndore të diferencuar një herë. Kjo përbën mungesën e një modeli të shpejtësisë këndore dhe përsëri lejon një parashikim të përmirësuar të orientimit të objektit.
Ndikimi i ferkimit në 2D (2 dimensional)
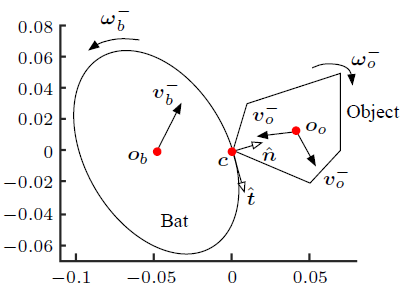
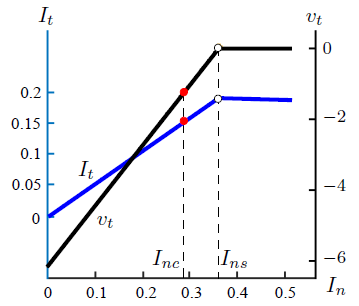
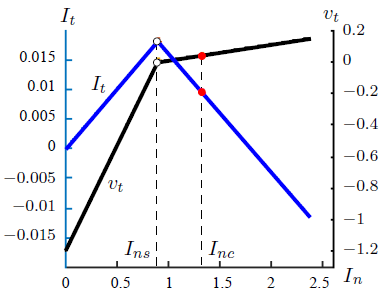
Ndikimi në mes të bat dhe objektit është modeluar me impuls, duke marrë parasysh ligjin kulm të fërkimit. Kthimi i bazuar në energji përdoret, kështu që gjatë periudhës së shkurtër të ndikimit, energjia kinetike është transferuar pjesërisht midis shkopit dhe objektit, dhe pjesërisht ka humbur deri në nxehtësi, dritë, zë dhe forma të tjera të energjisë. Përveç kësaj, me fërkime të konsideruara nën ligjin e Kulombit, gjendja e kontaktit midis dy objekteve ndryshon në varësi të shpejtësisë së tyre dhe parametrave fizikë, duke rezultuar në një kombinim të objekteve që rrëshqasin, ngjiten dhe rrotullohen kundërt. Figura më poshtë tregon një moment të ndikimit, si dhe dy raste të ndryshme të ndikimit në drejtim të kthesave të tyre impuls. Objektet fillimisht rrëshqasin, ku në rastin e parë ata kalojnë në fërkime, dhe në rastin e dytë, ato kalojnë në rrotullim të kundërt.
Planifikimi i Ndikimit
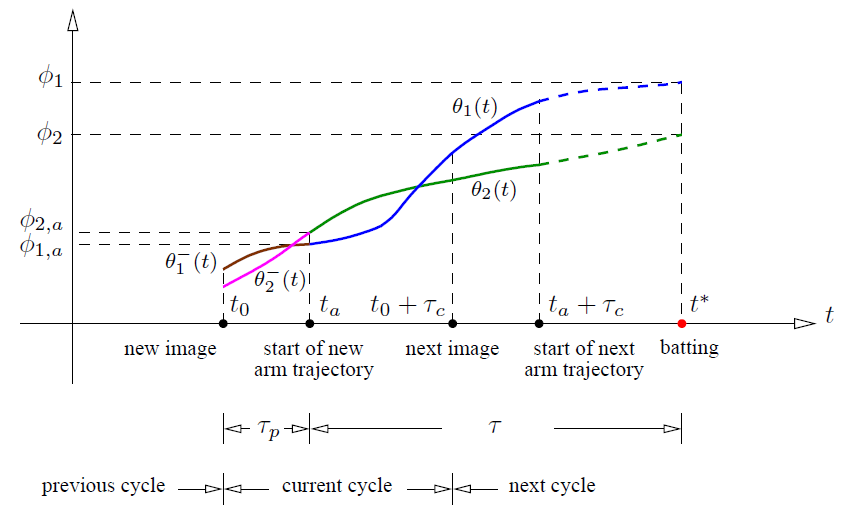
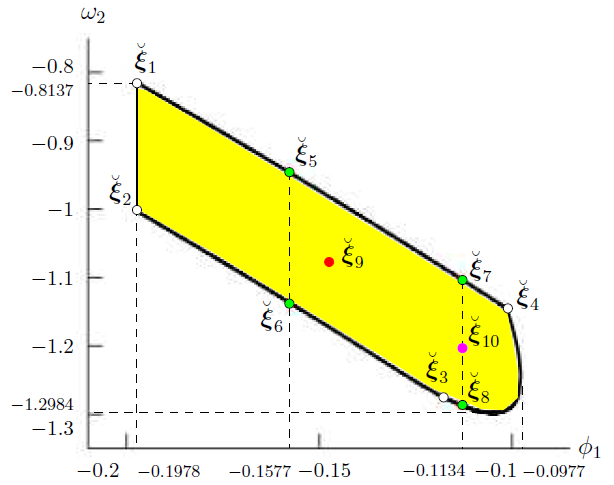
Planifikimi i lëvizjes së krahut të robotit konsiston në përcaktimin e pozicionit dhe shpejtësisë së bat për të kënaqur rezultatin e dëshiruar të ndikimit, duke i përkthyer ato në pozicione të përbashkëta dhe shpejtësi nëpërmjet kinematikës inversi dhe duke përsëritur këtë proces për të mbajtur lëvizjen e robotit të përditësuar dhe të saktë. Përveç kësaj, duhet të sigurohet gjatë lëvizjes së krahut që robot të mos tejkalojë kufijtë e pozicionit, shpejtësisë dhe nxitimit të nyjeve të saj. Këto kufizime të kombinuara me të tjerët përmbledhin një total prej gjashtëmbëdhjetë kufizimeve në hapësirën e shteteve të krahut që mund ta përfundojnë detyrën. Shumë nga këto kufizime janë përhapur nëpër ciklet e shumta të algoritmit, pasi trajektoret e përbashkëta të krahut janë të lidhura së bashku për të formuar një skaj të polinomeve kuartike. Shifrat më poshtë tregojnë respektivisht një komplot të trajektorive të përbashkëta brenda një cikli të algoritmit dhe hapësirën shtetërore të zgjidhjeve për një rast të problemit të goditjes.
Për më shumë informacion, i referohemi dokumenteve të mëposhtme:
Yan-Bin Jia, Mateu Gardner dhe Xiaoqian Mu. Luftoni një objekt në fluturim në objektiv. Pranuar në International Journal of Robotics Research, 2017.
Mateu Gardner, Yan-Bin Jia dhe Huan Lin. Luftoni objekte fluturuese në objektiv në 2D. Në Proceedings of the IEEE / RSJ Konferenca Ndërkombëtare mbi Robotët Inteligjente dhe Sistemet, f. 3225-3232, Daejeon, Kore, 9-14 tetor, 2016.
Ky material bazohet në punën e mbështetur nga Fondacioni Kombëtar i Shkencës nën Grantin IIS-1421034.
Çdo mendim, zbulim, konkluzion ose rekomandim i shprehur në këtë material janë ato të autorit (s) dhe nuk pasqyrojnë domosdoshmërisht pikëpamjet e Fondacionit Kombëtar të Shkencës.
Axhornimi i fundit më 5 prill 2017.